2 channels motor board and 16 channels steering gear expansion board motor drive
")
2 channels motor board and 16 channels steering gear expansion board motor drive Arduino robot car mechanical arm module.
Additional information
| SKU | GA029 |
|---|---|
| MOQ | 1 |
| Availability | In stock |
Product Details:
The channels motor and the 16 channels steering gear expansion board can drive the 2-way motor and the 16-way steering gear at the same time. In this example, the mobile phone APP is used to control the car and each steering gear.
1. Workflow:
ESPduino establishes AP hotspot -> listens to UDP broadcast -> Mobile phone connects to this hotspot -> Mobile app uses UDP broadcast control data -> ESPduino receives data parsing data control car and steering gear.
2. The control protocol is
1) Trolley control:
CMD =motor&d=x, (x=0)
Example: CMD =motor&d=5 Increase car speed by 100
0 to stop
1 to go forward
2 back
3 turn left to
4 the right to
5 Speed increased by 100
6 speed reduced by 100
A replies the current speed value of App
2) Steering gear control:
CMD =servo&n= Steering gear number &d= Rotation Angle
Example: CMD =servo&n=0&d=300 control the rotation of no. 0 steering gear
Steering gear range 0-15
Rotation Angle range 130-590 corresponds to 0-180 degrees, different models of steering gear range may be different
3. Materials:
ESPduino *1
2 way motor and 16 way steering gear expansion plate *1
Jumper cap * 2
* 1 power supply
The car * 1
5V steering gear several
4. Experimental steps:
1) installation
A) Short-circuit the two jumper caps to VM and VIN,VS and 5V respectively
B) Connect the power supply to VM and GND
C) Connect the two motors of the car to A+A- and B+B- respectively
D) Add the library file to the IDE library file directory and burn the source code nearby into espduino
E) Install the extended version on ESPduino
F) Open the white switch on the development board, and the LED lights on both boards will light up
2) Mobile control
A) Install mobile app
B) Turn on the wifi of the mobile phone and connect to the hotspot of Doit_Servo_XXXX (XXXX is chipID) with password 12345678
C) open app, select UDP client, click add, type ip192.168.4.1, port 6090
D) Enter the command in the control protocol to start controlling the car, such as CMD =motor&d=5 and increase the speed of the car by 100
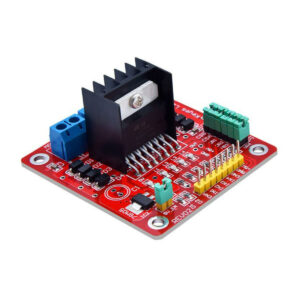
2 Motor && 16 Servo Drive Shield is a Motor and Servo Drive module compatible with Arduino UNO and ESPduino. The module adopts the design of stacked circuit board, which can be directly connected to the Arduino UNO or ESPduino circuit board. The product can simultaneously control 2-channel DC motor (4.5 ~ 36V) and 16-channel steering gear (5 ~ 18V), which is suitable for the driving control of mobile robot equipped with mechanical arm.
The module adopts Italian and French semi-dedicated drive full bridge chip L293DD, which can directly drive two dc motors or one stepper motor, and the driving current can reach 1.2a. Circuit diagram layout is reasonable, patch packaging, installation is very convenient. The module adopts IIC interface to control 16-way steering gear.
The module uses the IO ports of Arduino UNO and ESPDUINO as the control ports, so it only occupies four ports of D6, D7, D8 and D9 of the control board (D12, D13, D14 and D15 for ESPDUINO). Function as PWMB (motor B speed), DIRB (motor B direction), PWMA (motor A speed), DIRA (motor A direction) respectively. The module adopts humanized design scheme, using the power button switch, users can easily switch the power. This module can be directly used to control intelligent robots, using Bluetooth (reserved direct plug interface) or wifi control, refer to the control of UNO source see the attachment.
Product technical specifications:
1. Power input:
Motor power (VM) : 4.5V ~ 36V, can be independently powered;
Steering gear power supply (VIN) : 5 ~ 18V, can be independently powered;
2. Use method of single power supply:
Disconnect VM and VIN, (separate control motor, 6 ~ 36V);
Open circuit VS and VIN, separate control steering gear (6 ~ 18V);
Short-circuit VM and VIN, and short-circuit VS and 5V at the same time. At the same time control motor (6 ~ 18V) and 16 road 5V steering gear
3. Working current Io of motor driving part: ≤ 1.2a;
4. Large dissipation power: 4W (T=90℃)
5. Control signal input level: high level: 2.3V≤VIH≤VIN; Low level: -0.3V≤VIL≤1.5V
6. Working temperature: -25℃ ~ +125℃
7. Drive form: dual high-power H bridge drive
8. Module weight: about 46G